Para acabar com essas perdas, estamos usando chips integrados de ponte H e motores bipolares. O L293 é ótimo para essa aplicação e está funcionando perfeitamente, montamos o circuito encontrado no site http://lab.guilhermemartins.net/2009/01/29/l293d-custom-motor-driver/ e funcionou, porém esse chip não consegue fornecer a corrente requerida por alguns motores e acaba esquentando muito, podendo até queimar se ligado por muito tempo, por isso serão testados posteriormente outros chips como o L298 que parece ser bem melhor que o L293.
Abaixo o esquema do circuito montado.
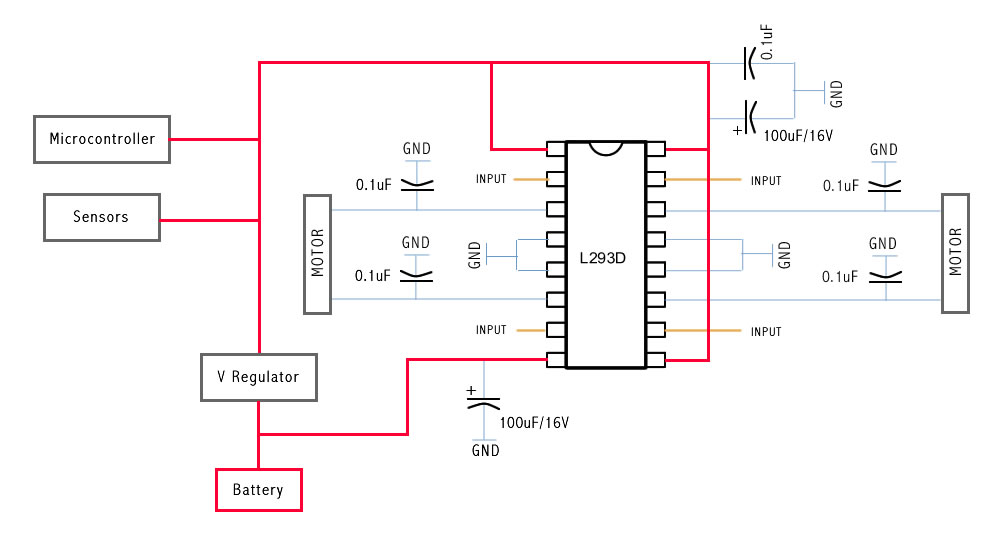
O CI é alimentado com 5V, porém o pino 8 deve ser alimentado com a mesma tensão de acionamento do motor, geralmente 12V.
Nenhum comentário:
Postar um comentário