Os motores foram acoplados aos eixos da CNC e já conseguem movimentá-los, está sendo usado o circuito citado no post anterior com 2 chips L293 controlando os 2 motores de passo.
Testar os motores unipolares apenas com a interface de potência e o Arduino acarretara muitos prejuízos como a queima de motores, trasistores e quem sabe até do Arduino - essa ultima acho muito difícil, mas é uma questão preventiva a considerar - foi assim que aconteceu pra gente, perdemos uns 3 motores e alguns transistores, isso por causa da falta de um controlador de corrente PWM. O motor ficava ligado muito tempo a corrente subia exponencialmente e CABUM, já era componente.
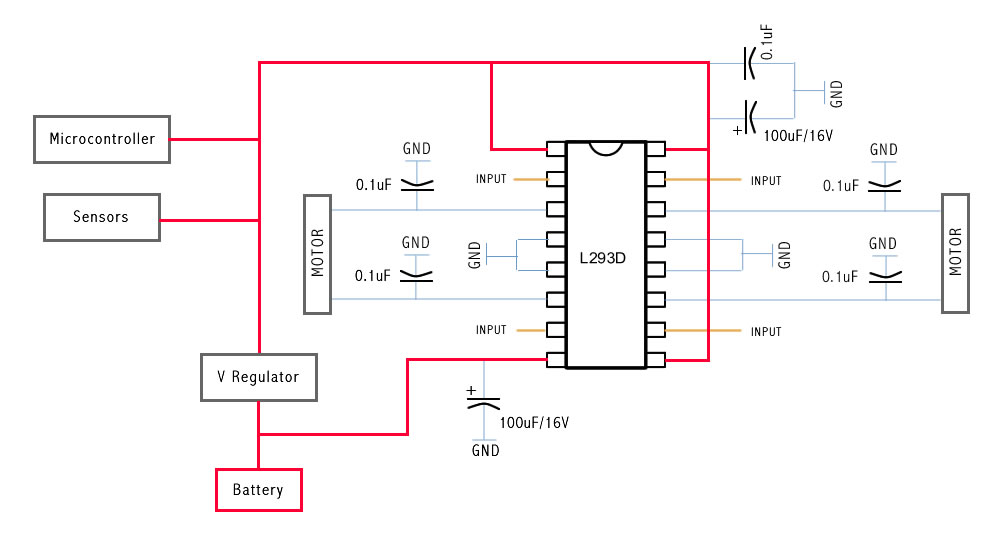
Para acabar com essas perdas, estamos usando chips integrados de ponte H e motores bipolares. O L293 é ótimo para essa aplicação e está funcionando perfeitamente, montamos o circuito encontrado no site http://lab.guilhermemartins.net/2009/01/29/l293d-custom-motor-driver/e funcionou, porém esse chip não consegue fornecer a corrente requerida por alguns motores e acaba esquentando muito, podendo até queimar se ligado por muito tempo, por isso serão testados posteriormente outros chips como o L298 que parece ser bem melhor que o L293.
Abaixo o esquema do circuito montado.
O CI é alimentado com 5V, porém o pino 8 deve ser alimentado com a mesma tensão de acionamento do motor, geralmente 12V.
Com o intuito de facilitar os testes e dando inicio a uma das proximas etapas, começamos a estudar o Arduino, que é uma plataforma de hardware livre que tem como objetivo criar ferramentas que são acessíveis, com baixo custo, flexíveis e fáceis de usar. Principalmente para aqueles que não teriam alcance aos controladores mais sofisticados e de ferramentas mais complicadas. Mais informações sobre o Arduino no site oficial http://arduino.cc/.
O software do Arduino é baseado na linguagem C/C++, é simples e fácil, dá pra aprender a programar rapidinho, principalmente aqueles que já tem uma base em C/C++. Com o Arduino foi possível gerar as sequências necessárias e controlar a velocidade do motor de forma fácil e rápida.
Inicialmente é importante escolher os motores que serão usados para a movimentação dos eixos e isso não é tão simples como parece. Existem vários tipos de motores com características e valores específicos e para escolhe-los é necessários testar suas funcionalidades. Como trata-se de uma CNC será necessário um valor razoável de torque, por isso não é qualquer motor que se enquadra nessa aplicação. Os motores que estão sendo avaliados através de testes são os motores de passo(ou motor passo a passo), eles são os mais indicados por serem bastante precisos. Para continuarmos é necessário saber como é o funcionamento desses motores, o link abaixo ajudará a entender essa parte.
Considerando que foi lido o PDF acima e já se tem uma noção do que é motor de passo, seus tipos e características, vamos para a próxima parte. Dependendo do tipo do motor de passo usado, bipolar ou unipolar, o circuito de controle é diferente, sendo que para o unipolar deve ser um circuito que gere a sequência de acionamento das bobinas de acordo com a operação desejada(meio passo, passo inteiro, etc) e o bipolar que é um pouco mais complexo, deve ser um circuito que possa controlar o sentido da corrente nas bobinas. Nos primeiros testes realizados no laboratório, foi testados motores unipolares e o circuito consistia em um CI contador e uma interface de potência construída com transistores darligton tip 120( http://www.datasheetcatalog.org/datasheet2/7/0tz6xxzzi7w2oz6qz7a0uhkg817y.pdf ).
Ignorem o suporte usado para os transistores, créditos ao nosso MacGyver Giovanni. Esse primeiro teste deu um pouco de dor de cabeça, pois o chip as vezes não gerava a sequencia certa o que fazia o motor trepidar, se o defeito era erro na montagem ou problema no chip já é outra historia. Enfim, com esse experimento foi possível descobrir a ordem das bobinas dos motores usados e testar sua usabilidade. Mais detalhes sobre a continuação dos testes nos próximos posts.